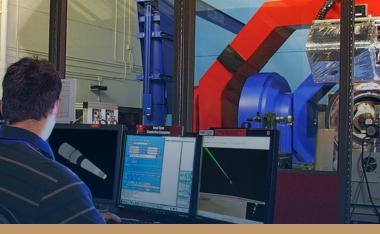
Included are system simulations, and test and evaluations related to threat radars, missiles, air and ground vehicles, unmanned and autonomous systems, transportation systems, power and energy systems, acoustics, flow control, and food processing technologies.
This skillset provides a firm foundation for expansion into core areas such as unmanned and autonomous systems. This work demonstrates capabilities such as interoperability across unmanned air and ground vehicles, as well as in unmanned systems common control, collaborative autonomy, and payload integration.
ATAS divisions include systems development, robotics and autonomous systems, aeroacoustics, food processing technology, and behavior modeling and computational social science.
Related initiatives include:
- Systems Development Division
- Robotics and Autonomous Systems Division
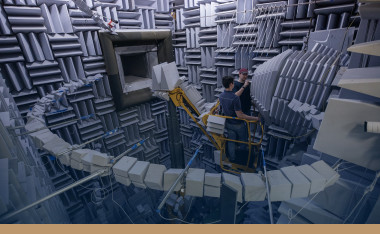
- Aeroacoustics
- Food Processing Technology Division
- Behavior Modeling and Computational Social Science